Freeform Surface Representation From TLS-Point Clouds
Workshop Description:
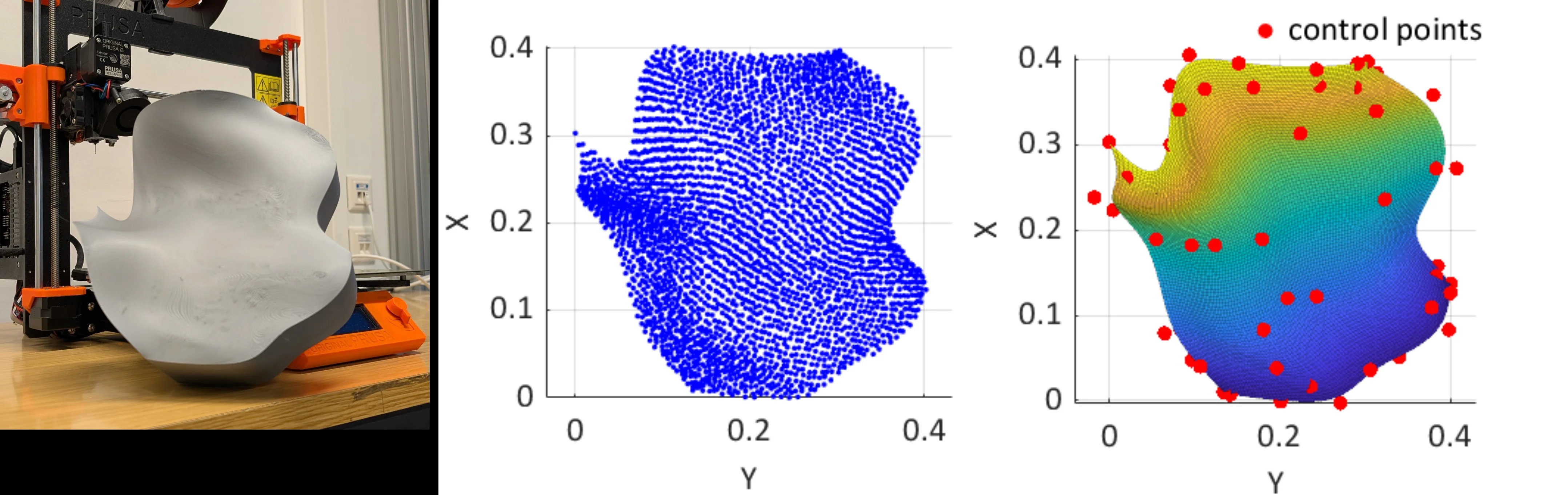
Approaching deformation analysis of smooth surfaces based on TLS-point clouds usually involves the surface representation as an intermediate step. Different methods ranging from triangulation techniques to representation by freefrom functions exist up to now. As deformation analysis includes a statistically based decision, those methods allowing a statistical evaluation of reconstruction and quality analysis are of primary interest. Furthermore, the employed methods should ensure the derivation of reproducible points or features, so that these can be examined for possible significant displacement. Following the requirements above this workshop will focus on surface reconstruction from TLS-point clouds based on B-splines. These functions are chosen due to their versatility and ability to represent various smooth surfaces including freeforms.
After an introductory talk (about 1h) participants will get an insight on the B-spline based surface representation. Point clouds acquired on 3D-printed test specimens will serve as a data basis. After the data pre-processing, the steps of introducing surface parameters, of adjusting the surface representation (parameter estimation) and of model selection will be inferred. The workshop concludes with an analytics session, where starting from the same data basis the effects on the obtained results (parameters and their quality description) of different noise levels, of accounting/ignoring correlations will be considered.
During the workshop, code developed by the organizing institutions is used.
As an outcome of the workshop, participants will gain a good understanding of B-spline based surface representation. They will familiarize with the methodological steps necessary for this approach and will be able to perform the processing based on the available code.
The obtained surface representations will serve as input for the “Advanced Methods” treated in the workshop “Point cloud-based Deformation Analysis”.
The workshop starts with an introductory talk, followed by hands-on data processing under guidance. Data basis: Point clouds measured at two different 3D-printed test specimens.
Organizers:
- Prof. Dr.-Ing. Hans Neuner
- Prof. Dr.-Ing. Corinna Harmening
- Elisabeth Ötsch, M.Sc.
- Stefan Blochberger, B.Sc.
- Sadia Sadiq, M.Sc.
- Victor Alejandro Reinoso Rojas, B.Sc.
Target Group and Requirements :
Basic knowledge of MATLAB and of adjustment theory.